扩散模型
第一步:基础数学
概率论(概率分布、期望)是扩散模型的数学基础。
- 概率分布:扩散模型的核心是处理数据分布,比如正态分布(Gaussian Distribution)。正态分布的概率密度函数是:
p(x) = \frac{1}{\sqrt{2 \pi \sigma^2 }} e^{-\frac{(x-\mu)^2}{2\sigma^2}}
其中\mu 是均值,\sigma 是标准差。 - 噪声添加:扩散模型会逐步往数据中加噪声,这需要理解随机变量。
第二步:扩散模型原理
扩散模型的基本思想是通过一个“加噪-去噪”的过程,从随机噪声生成符合目标分布的数据(比如航天器轨迹)。以下是逐步拆解:
2.1 核心概念
- 前向过程(加噪):从真实数据(如航天器轨迹)开始,逐步添加高斯噪声,直到数据变成纯噪声。这个过程是固定的、不需要学习的。
- 反向过程(去噪):从纯噪声开始,逐步去掉噪声,恢复到原始数据。这个过程需要训练一个神经网络来预测每一步的去噪方向。
2.2 数学表述
- 前向过程:
- 假设初始数据是 x_0(比如轨迹的位置序列)。
- 在第 t 步添加噪声,得到 x_t:
x_t = \sqrt{1-\beta_t} x_{t-1} + \sqrt{\beta_t} \epsilon
其中 \epsilon \sim \mathcal{N}(0, I) 是标准正态噪声,\beta_t 是每一步的噪声强度(通常随 t 增加而变大)。 - 经过 T 步(比如 T=1000),x_T 接近纯噪声 \mathcal{N}(0, I)。
- 反向过程:
- 从 x_T 开始,逐步去噪,恢复到 x_0。反向一步的公式是:
x_{t-1} = \frac{1}{\sqrt{1-\beta_t}} \left( x_t – \frac{\beta_t}{\sqrt{1-\alpha_t}} \epsilon_\theta(x_t, t) \right) + \sigma_t z
其中 \epsilon_\theta(x_t, t) 是神经网络预测的噪声,\alpha_t = \prod_{s=1}^t (1-\beta_s),z \sim \mathcal{N}(0, I) 是小的随机噪声。
- 从 x_T 开始,逐步去噪,恢复到 x_0。反向一步的公式是:
2.3 训练目标
- 目标:训练神经网络 \epsilon_\theta 来预测每一步加入的噪声 \epsilon。
- 损失函数:通常是最小化预测噪声和真实噪声之间的差距:
L = \mathbb{E} \left[ || \epsilon – \epsilon_\theta(x_t, t) ||^2 \right] - 直观理解:网络学会“看一眼带噪数据 x_t,猜出原始噪声是什么”,从而一步步去噪。
2.4 生成过程
- 步骤:
- 从纯噪声 x_T \sim \mathcal{N}(0, I) 开始。
- 用训练好的 \epsilon_\theta 逐步去噪,计算 x_{T-1}, x_{T-2}, \dots, x_0。
- 最终 x_0 就是生成的数据(比如一条航天器轨迹)。
用 Python 代码理解扩散模型(注:colab实现。我们自己的workspace版本不对)
代码目标
我们将:
1. 从一个简单数据(如数字 5)开始,模拟前向过程(加噪),观察它如何变成纯噪声。
2. 训练一个简单的神经网络,学习反向过程(去噪),尝试恢复原始数据。
3. 用可视化展示加噪和去噪的过程。
以下是代码和逐步解释:
import numpy as np
import matplotlib.pyplot as plt
import tensorflow as tf
from tensorflow import keras
# 设置随机种子
np.random.seed(42)
tf.random.set_seed(42)
# 参数设置
T = 50 # 时间步数
beta = np.linspace(0.0001, 0.01, T) # 更平滑的噪声调度
alpha = 1 - beta
alpha_bar = np.cumprod(alpha)
# 前向过程:加噪
def forward_diffusion(x0, t):
noise = np.random.normal(0, 1)
sqrt_alpha_bar = np.sqrt(alpha_bar[t])
sqrt_one_minus_alpha_bar = np.sqrt(1 - alpha_bar[t])
xt = sqrt_alpha_bar * x0 + sqrt_one_minus_alpha_bar * noise
return xt, noise
# 原始数据
x0 = 5.0
# 模拟前向过程
x_t_history = [x0]
noise_history = []
for t in range(T):
xt, noise = forward_diffusion(x0, t)
x_t_history.append(xt)
noise_history.append(noise)
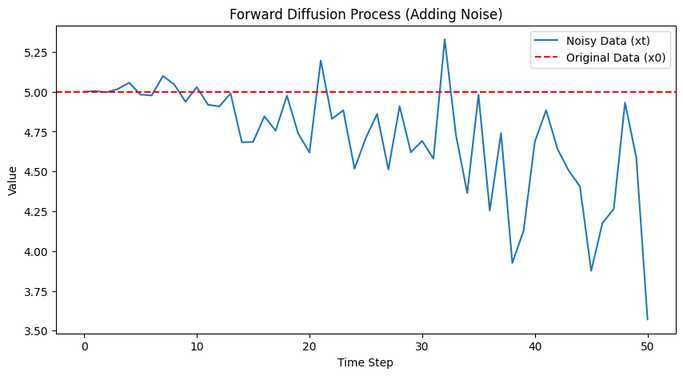
# 可视化前向过程
plt.figure(figsize=(10, 5))
plt.plot(x_t_history, label="Noisy Data (xt)")
plt.axhline(y=x0, color='r', linestyle='--', label="Original Data (x0)")
plt.xlabel("Time Step")
plt.ylabel("Value")
plt.title("Forward Diffusion Process (Adding Noise)")
plt.legend()
plt.show()
# 更深的神经网络
model = keras.Sequential([
keras.layers.Input(shape=(2,)),
keras.layers.Dense(128, activation='relu'),
keras.layers.Dense(128, activation='relu'),
keras.layers.Dense(128, activation='relu'),
keras.layers.Dense(1)
])
model.compile(optimizer='adam', loss='mse')
# 生成更多训练数据
n_samples = 10000 # 增加到 10000 个样本
x_train = np.zeros((n_samples, 2))
y_train = np.zeros(n_samples)
for i in range(n_samples):
t = np.random.randint(0, T)
xt, noise = forward_diffusion(x0, t)
x_train[i] = [xt, t / T]
y_train[i] = noise
# 训练模型
model.fit(x_train, y_train, epochs=100, batch_size=64, verbose=1)
# 反向过程:去噪(添加噪声项)
def reverse_diffusion(xt, t):
if t == 0: # 最后一步不加噪声
t_normalized = t / T
input_data = np.array([[xt, t_normalized]])
predicted_noise = model.predict(input_data, verbose=0)[0][0]
sqrt_one_minus_alpha_bar = np.sqrt(1 - alpha_bar[t])
sqrt_alpha = np.sqrt(alpha[t])
x_prev = (xt - sqrt_one_minus_alpha_bar * predicted_noise) / sqrt_alpha
else:
t_normalized = t / T
input_data = np.array([[xt, t_normalized]])
predicted_noise = model.predict(input_data, verbose=0)[0][0]
sqrt_one_minus_alpha_bar = np.sqrt(1 - alpha_bar[t])
sqrt_alpha = np.sqrt(alpha[t])
sigma = np.sqrt(beta[t]) # 添加反向噪声的标准差
z = np.random.normal(0, 1)
x_prev = (xt - sqrt_one_minus_alpha_bar * predicted_noise) / sqrt_alpha + sigma * z
return x_prev
# 从纯噪声开始生成
x_t = np.random.normal(0, 1)
x_t_reverse_history = [x_t]
for t in range(T-1, -1, -1):
x_t = reverse_diffusion(x_t, t)
x_t_reverse_history.append(x_t)
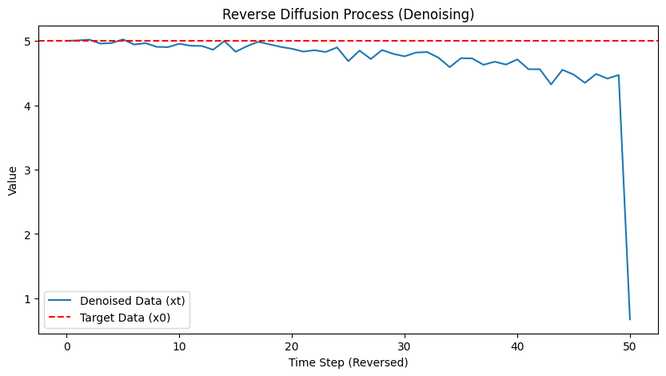
# 可视化反向过程
plt.figure(figsize=(10, 5))
plt.plot(range(T+1), x_t_reverse_history[::-1], label="Denoised Data (xt)")
plt.axhline(y=x0, color='r', linestyle='--', label="Target Data (x0)")
plt.xlabel("Time Step (Reversed)")
plt.ylabel("Value")
plt.title("Reverse Diffusion Process (Denoising)")
plt.legend()
plt.show()
print(f"原始数据: {x0}")
print(f"生成数据: {x_t_reverse_history[-1]}")
代码逐步解释
1. 前向过程(加噪)
- 输入:初始数据
x0 = 5.0。 - 过程:每一步用公式 x_t = \sqrt{\alpha_t} x_{t-1} + \sqrt{1-\alpha_t} \epsilon 添加噪声,\alpha_t = 1 – \beta_t。
- 输出:
x_t_history记录了从 x_0 到 x_T 的变化,最终接近纯噪声。 - 可视化:第一张图显示数据如何逐渐偏离原始值,变成随机噪声。
2. 训练神经网络
- 目标:让神经网络预测每一步的噪声 \epsilon。
- 输入:带噪数据 x_t 和时间步 t。
- 输出:预测的噪声值。
- 训练数据:通过前向过程生成 1000 个样本,训练模型。
3. 反向过程(去噪)
- 输入:从纯噪声 x_T 开始。
- 过程:用训练好的模型预测噪声,逐步计算 x_{t-1}。
- 输出:
x_t_reverse_history记录了从噪声恢复到数据的轨迹。 - 可视化:第二张图显示数据如何从噪声逐渐接近原始值 x_0 = 5。
运行结果
- 第一张图:你会看到数据从 5 开始,逐渐变成随机值。
- 第二张图:从随机噪声开始,逐渐接近 5(可能不完全精确,因为我们用的是简单模型和少量训练)。
- 终端输出:生成的数据会接近 5。
原始数据: 5.0
生成数据: 5.000151417931243